Как выглядит человек в эхолокационных сигналах дельфинов ( 7 фото )
Дельфин обладает недостижимой для созданных человеком приборов эффективностью гидроакустической локацией. Он лоцирует дробинку, упавшую в воду на расстоянии 15м; различает размеры предметов одинаковой формы, отличающиеся на единицы процентов, их материал; различает подобно томографу детали внутреннего строения объектов, находящихся в воде или в слое ила, их форму и другие параметры, обнаруживает съедобную рыбу на расстоянии три километра и отличает от той, которая не идет в пищу.
Это достигается совершенством системы гидролокатор-мозг. На рисунке приведена сугубо схематическая структура функционирования гидролокатора дельфина.
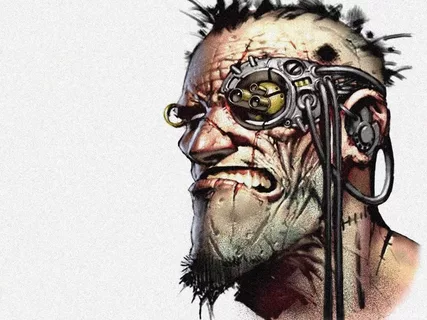
По эхолокационным сигналам дельфинов ученые смогли выяснить, как эти морские млекопитающие «видят» находящегося в воде человека. Сонарные сигналы, записанные подводным микрофоном, были преобразованы в картинки. Об этом сообщает Daily Mail.
И вот как это выглядит …
Исследование проведено в дельфинарии города Пуэрто-Авентурас (штат Кинтана-Роо, Мексика). Дайвер Джим МакДоноу (Jim McDonough) надел грузовой пояс и активно выдыхал воздух. Было принято решение не использовать акваланг, так как пузырьки от него повлияли бы на исход эксперимента. Сигналы (записанное на микрофон эхо от сигналов дельфина, направленных в сторону МакДоноу) были переданы британскому ученому Джону Стюарту Риду (John Stuart Reid) — специалисту по акустической физике, создателю аппарата визуализации звука CymaScope.
Основной принцип работы аппарата — преобразование звуковых вибраций в колебания воды. Сначала ученые загрузили последовательность ультразвуковых эхолокационных сигналов дельфина в CymaScope, поставив камеру в режим воспроизводства видео. На поверхности воды они увидели некую странную форму. Затем они проиграли видео назад, кадр за кадром, и через некоторое время увидели смутный силуэт человека. Компьютерная обработка изображения принесла новые детали (в частности, исследователи смогли разглядеть грузовой пояс МакДоноу).
Ранее (в 2012 году) с помощью той же методики биологи выяснили, как животные воспринимают неодушевленные объекты.
Таким образом, эхолокация позволяет дельфинам «увидеть» не только тени объектов, но и очертания их поверхности. «Мы думаем, что дельфины могут пользоваться звуко-визуальным языком — языком картинок, которыми они делятся друг с другом (кодируя картинки эхолокационными сигналами — прим. «Ленты.ру»)», — заявил автор исследования Джек Кассевиц (Jack Kassewitz).
А теперь давайте все же подробнее изучим как это работает.
Носовой канал (1), идущий от дыхала к легким соединяет три пары воздушных мешков (2), представляющие собой полости, окруженные системой радиальных мышц.
Мембраны, находящиеся в месте соединения мешков с носовым каналом, при продувании воздуха из левого мешка в правый или наоборот генерируют ультразвуковые колебания, которые фокусируются с помощью рефлектора (3), представляющего собой параболическое углубление в передней части черепа и акустической линзы (4), представляющей собой жировое образование, окруженное системой мышц, изменяющих при необходимости его форму и, следовательно, фокусное расстояние.
В результате образуется ультразвуковой луч (5), частота и диаграмма направленности которого могут меняться. Лоцируемый объект 6 рассеивает падающее на него излучение и воспринимается антенной системой в виде трех областей (7), расположенных на коже раструма и нижней челюсти дельфина.Эти области образуются акустическими рецепторами кожи с плотностью распределения около 600 единиц на 1 кв.см. и представляют собой, по сути, пространственную голографическую приемную систему.
Приведенная схема сугубо условна. Действительная форма ее элементов значительно сложнее. Однако отображение этих анатомических деталей только усложнило бы понимание принципа действия системы.
Сделаем маленькое отступление. Скорость движения дельфина в воде может достигать величины50-60 км/час, что намного превышает его мускульные энергетические возможности. Впервые на этот факт обратил внимание Джон Грэй.
Он показал, что удобообтекаемое твердое тело одинаковых с дельфином размеров и формой должно было бы затрачивать для преодоления сопротивления воды мощность, примерно в семь раз большую, чем та, которой он располагает.
Этот факт, получивший впоследствии название «парадокс Грэя», объясняется тем, что коэффициент сопротивления при ламинарном обтекании значительно ниже, чем при турбулентном.
Объясняют парадокс Грэя особенности структуры и функционирования кожного покрова с гидрофобными и демпфирующими свойствами, а также двигательный механизм, как кожного покрова, так и всего тела дельфина.
Прежде всего, поверхность кожи совершенно гладкая и обладает гидрофоб-ным свойством (когда дельфин выныривает, на его коже нет капель воды). Гладкость же поверхности обеспечивается ее постоянным обновлением, слущиванием отмирающих частей, что защищает от биологического обрастания, столь характерного для морских плавсредств и многих обитателей морей. Это первая ступень защиты, обеспечивающая минимальный коэффициент трения.
Вторая ступень защиты обеспечивает гашение мелкомасштабных пульсаций давления водной среды предвещающих образование турбулентности.
Для этой цели эпидермис содержит два слоя: тонкий наружный и лежащий под ним ростковый или шиповидный. В ростковый слой входят шиповидные упругие сосочки дермы, которые обеспечивают надежное сцепление с амортизатором – слоем жира, пронизанным густыми сплетениями коллагеновых и эластиновых волокон.
Первая и вторая ступени – пассивные.
Под жировым слоем находится слой развитой системы подкожной мускулатуры и кровеносных сосудов. Это третья ступень защиты.
Работает третья ступень защиты следующим образом. Важнейшим условием сохранения ламинарности (безвихревого обтекания) является наличие продольного, отрицательного градиента давления, который препятствует образованию вихрей. Как только в каком либо мес-те кожи возникает тенденция к образованию положительного градиента, мускулатурный, насыщенный кровью слой тут же меняет форму поверхности тела дельфина в соответствующем месте таким образом, что ликвидирует эту тенденцию. Это уже активная мышечно-гидравлическая защита.
Информацию о поле давления выдают соответствующие рецепторы, покрывающие все тело дельфина. Одним из рецепторов осязания у животных и человека являются волосы. Дельфин, утратив волосы при своей эволюции, превратил то, что от них осталось в эти рецепторы. Поле дав-лений обтекающей воды анализируется соответствующим разделом мозга и выдает нужные команды вегетативной нервной системе, управляющей системой мускулатуры и крови.
Ту же роль в сохранении ламинарности обтекания тела дельфина играет его хвостовая часть, движения которой создают отрицательный градиент давления. Это четвертая степень защиты.
Когда дельфину нужно достичь максимально возможной скорости, например, перед высоким прыжком, он включает «форсаж», превращая кожу в дополнительный двигатель. На скоростной киносъемке хорошо видно, как по телу дельфина в направлении хвоста бежит поперечный «гофр» из выступов кожи, который является дополнительным гребным механизмом.
Таким образом, дельфин весь является двигателем высшей степени совершенства, способным двигаться с большой скоростью, находясь при этом в полностью ламинарном обтекании.
А это значит, кроме всего прочего, что у него нет и шумов обтекания, которыми так богаты технические морские средства.
А теперь, закончим сделанное отступление и вернемся к гидроакустике, зная, что дельфин движется, не создавая гидродинамических шумов.
Все тело человека покрыто густой сетью рецепторов осязания. Рецепторов прикосновения и давления (механорецепторов) в коже человека свыше 600 тысяч. Это тельца Пачини и Мейснера, а также диски Меркеля.
Механорецепторы воспринимают, в том числе вибрации и звук. Последнее не является основным их назначением – для этого существуют уши. Однако известны случаи, когда с детства глухие люди, положив ладони на стол или поставив ступни на пол, могут слушать музыку.
У дельфина механорецепторов, по-видимому, значительно больше, чем у человека. В процессе эволюции они превратились в многие тысячи гидрофонов, покрывающих все тело дельфина. В результате поверхность тела дельфина представляет собой чрезвычайно развитое многофункциональное антенное устройство, работающее в диапазоне частот от нескольких герц до 200 кГц при очень низком уровне собственных шумов и имеющее на выходе уникальное анализирующее устройство – мозг.
Иными словами все тело дельфина – это совершенный акустический глаз, который может работать как в активном, так и в пассивном режиме с круговым обзором и возможностью концентрировать максимальную разрешающую способность в нужном направлении.
Различие между оптическим глазом и акустическим заключается только в том, что в первом случае анализ информации осуществляется на основе законов геометрической оптики, а во втором – на основе законов акустической голографии.
В линзовой системе единственная информация, которую можно получить от одного рецептора, это амплитуда акустического давления. В голографической же системе построения изображения используется как амплитуда, так и фаза. Поскольку голографическая антенна несет большую информацию от каждого рецептора, то получаемые изображения обладают большей информативностью. К тому же, поскольку рецепторы покрывают все тело дельфина, т.е. антенна имеет максимальные размеры, то и разрешение ее имеет максимально достижимую величину.
На основе вышесказанного рассмотрим общую схему гидроакустической системы дельфина.
Дельфин как приемно-излучающая гидроакустическая
система.
Первая подсистема – уши (1), дополняемые третьим приемным устройством – нижней челюстью. Она обеспечивает, в основном, прием коммуникационных сигналов, а также обеспечивает часть функций освещения подводной обстановки.
Вторая подсистема – изучающая все типы звуков в диапазоне 10 Гц – 196 кГц. Зона ее излучения (2).
Третья подсистема – система ближней гидролокации работает в зоне (3) и использует наиболее высокочастотные сигналы.Те же гидроакустические рецепторы, что с большой плотностью распределены на лицевой стороне, с меньшей плотностью расположены по поверхности всего тела дельфина и образуют многоэлементную широкополосную гидроакустическую приемную антенну с круговой диаграммой направленности (4).
Эта подсистема голографического приема обеспечивает освещение подводной обстановки, работая как в активном, так и в пассивном режимах, а также дополняет работу первой подсистемы.
Дельфин может воспринимать звуки такой частоты, которые сам не в состоянии воспроизвести, в отличие от наземных млекопитающих и человека, которые слышат звуки, только такой частоты, которые издают сами.
Дельфин обладает несколькими гидроакустическими информационными системами, частично перекрывающими друг друга и работающих параллельно.Разделение поступающей информации, и совместная ее обработка осуществляется с по-мощью мозга, в реальном масштабе времени.
Таким образом, обеспечивается существенное улучшение отношения сигнал/шум и соединение направленного приема, обеспечивающего высокое пространственное разрешение, с круговым обзором, который ведется как в активном, так и в пассивном режиме, что недоступно для технических средств.
Полученная информация кодируется мозгом, по-видимому, в виде четырехмерных образов (три пространственных и один частотный).
Для дельфина гидроакустический канал получения информации означает гораздо больше, чем зрение для человека. Остальные органы чувств играют вспомогательную роль.
Что видит дельфин с помощью своей гидроакустической системы? Он видит поверхность, видит дно со всеми деталями его строения, в том числе с деталями слоев подстилающих пород; видит предметы, лежащие на дне, в том числе и лежащие глубоко в иле; видит особенности каждого предмета, его размеры, форму, особенности материала, внутреннего устройства.
Он ничего не может «сказать», о каком либо конкретном предмете, если раньше его не видел. Но если рядом находятся два подобных друг другу предмета, он при некоторой тренировке, может отличить один от другого по любому параметру: по размеру, по форме, по материалу, по на-личию пустот внутри, размерам и форме этих пустот и т.д.
Он видит все плавающие вокруг него объекты (в общих чертах, так сказать «боковым зрением») и если что-то его заинтересовало, концентрирует на нем остроту своего акустического зрения. Кстати, когда дельфин плывет или хочет рассмотреть что-либо, он делает движения головой, очень похожие на движения зрачков человека в подобных ситуациях.
Несколько простейших примеров. Дельфин различает: два совершенно одинаковых по форме и размерам предмета, но сделанных, один — из стали, другой – из латуни; два одинаково обработанных сплошных стальных шара, различающихся по диаметру на 2-3%; два одинаковых герметичных толстостенных полых цилиндра, полость которых частично заполнена водой, если разность уровней воды в них со-ставляет 3-4 мм и т д.
Более сложный пример. Если в воде плывет несколько человек, среди которых один знаком дельфину, дельфин подплывет именно к нему, если знакомство имеет положительный оттенок. Если плывет одновременно, пусть на большом расстоянии, несколько хорошо знакомых людей, тренированный дельфин подплывет в случае получения команды именно к тому, на кого ему будет указано.
Как это происходит? Каждый подводный объект является трансформатором гидроакустических полей в окружающем его пространстве. На каких-то частотах преобладает отражение падающих на объект волн, на каких-то – поглощение. Происходит сдвиг фаз и меняется интерференционная структура поля, поглощенная объектом акустическая энергия переизлучается им на собственных резонансных частотах и т.д.
Каждый излученный дельфином гидроакустический локационный импульс, отражаясь от объекта, несет информацию о его положении, размерах и форме (по углу и времени прихода эхо-волн). Энергия же импульса, имеющего форму дельта-функции, возбуждает весь спектр собственных резонансных частот объекта, что создает его неповторимый акустический образ.
Основную информацию дельфину дают активные гидролокаторы: передний (высокого разрешения) и круговой (грубого разрешения), а также пассивная слуховая стереосистема приема окружающих акустических полей.
Но возможно, определенный вклад вносит и голографическая система, работающая в пассивном режиме (без собственной подсветки), основанная на искажении объектами интерференционных полей на различных частотах, образуемых внешними источниками как когерентного, так и широкополосного фонового излучения.
Источник:






